Research
非生物型ロボットの振る舞いの変化による印象変化
Impression Changes Caused by Behavioral Variations and Collision Avoidance Interactions in Non-Anthropomorphic Robots
概要
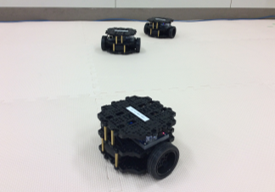
掃除ロボットのような非生物型ロボットは,人にとってわかりやすい顔表情・ジェスチャといった感情,内部状態を表現する手段を持たない.ロボット自体の振る舞いやロボット間のインタラクションを通じて,内部状態を表出したり,ロボットに対する印象を変化させることを目指す.本研究では,複数台の非生物型ロボットが共同でタスクを行う場面を想定した実験を行い,ロボットの速度や衝突回避動作の有無を変化させることで,ロボットの印象が変化することを確認した.
発表文献
-
F. Hamanaka, S. Yoshida, H. Yamazoe, Impression evaluation of interaction among robots based on collision avoidance behaviors, HAI2021, 2021
-
F. Hamanaka, S. Yoshida, H. Yamazoe, Designing interaction among robots that changes impressions on robots, IROS2021 LBR (poster), 2021
-
濵中文緒, 𠮷田竣亮, 山添大丈, 移動パターンによる複数ロボット間の関係性表現と印象変化, 情報処理学会HCI研究会192, 2021